

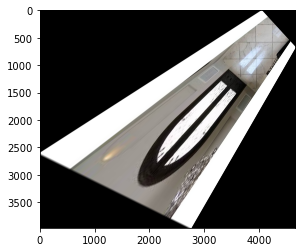
Here are some of the pictures I originally planned to stitch together:












I used least squares on a matrix solving Hx = w * x' that forced the 9th element to be 1.
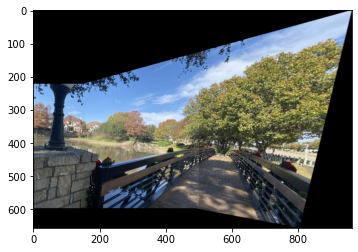
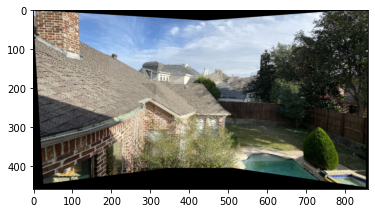
I applied to warping too the image by computing each new pixel's position, shifting via a translation matrix to make sure the new image would be in bounds, and used cv2.remap to interpolate from the original image.
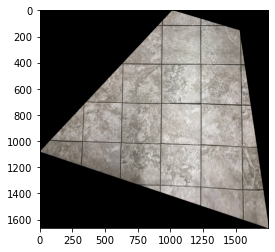
I calculated the homography of images with tiles to a square. Then, I warped the images so that the tiles became squares.




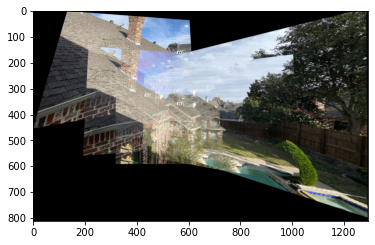
Through calculating the homography and warping the image, I am able to create a mosaic. This is done by finding the homography needed transform one image into another's space and then blending them together.
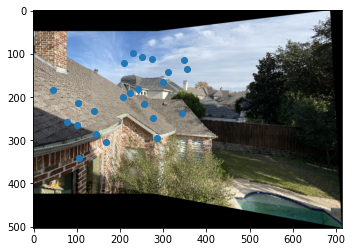
The first step is selecting at least 4 corresponding points in order to compute the homography.




In the second pair of images, I selected more points because I found selecting just 4 points yielded very unstable results. After computing the homography, the new width and height as well as shifts were calculated based off of the min and max values of x and y in the warped image. The shifts were applied via an additional translation matrix.




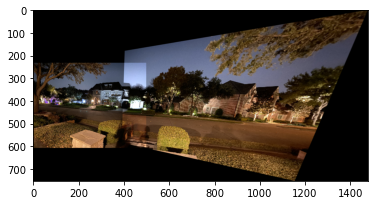
I tried various types of blending with and without masks. The simplest was having a binary mask with ones for the first image and zeros for the second image.


After that, I tried blending with a laplacian stack as done in a previous project. I found that there was indeed some good blending, but the problem is that it actually left a strong artifact where the images end. This is because the images blended have 0's and essentially the unwanted black was blended in.


I then tried blending with a very smooth mask, a technique I created for a previous project. However, the underlying problem of unwanted black existing in the original image does not go away and the result was pretty much exactly the same as normal laplacian blending. The next blend I tried was alpha blending. The problem with this blend was that the overlap becomes markedly different.

I had an idea of only taking an average if both pixels were overlapping. This meant computing a mask for the overlap, as well as a mask for the non-overlapping portions.
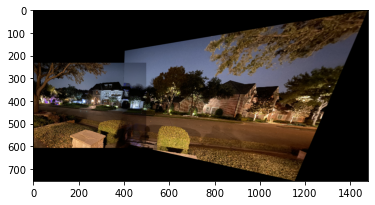

Lastly, I tried simply taking the max of the two images. The result was very good and also very fast. The second image looks slightly off because the homography is imperfect due to the hand selected points. This is more visible in the above alpha blending, where the two trash cans are clearly not aligned. I decided I liked the result of max the most, since it was both fast computationally, as well as effective.


To automate the entire process, you need to automate picking pairs of points.
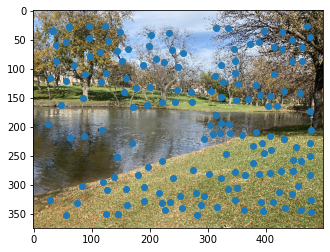
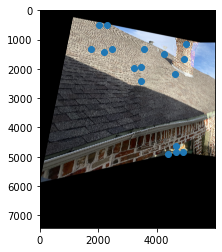
The first step in automating picking pairs of points is getting possible points of interest. Harris corners are "corners" in the sense that if you shift a window around that point, the norm of the window changes drastically. After that is decreasing and picking the best points, the points that not only have the best scores but are also far away from other good points. That is adaptive non-maximal suppression. I implemented ANMS, but it was really computationally expensive (took almost an hour for one image), so I left it out of my overall algorithm. Instead, I altered harris corners so that it would pick points that were at least some minimum distance away that was dependent on the size of the image too reduce the number of corners.



In order to match up the points, you have to have some information around the point to know how similar two points are. This is simply a 39x39 patch around a point rescaled to 5x5 for comparison purposes, called feature descriptors.
After getting the feature descriptors, we match them up with feature descriptors of the points of another image to get corresponding points. This is done by comparing each best patch of a feature descriptor with its second best patch. If the best patch is significantly better than second best patch, then it is likely that the best patch is its pair. I originally set the threshold to be .95, later changing it to .99 for threshold.


There is still one problem, however, which is that homographies are quite sensitive to even the slightest outlier. To get rid of this problem, I implemented the RANSAC algorithm, which randomly selects four pairs of points, computes their homography, and then count its inliners, aka the number of points that agree with the homography. This is done by applying the homography to one point and seeing how much it differs from its pair. The homography with the most inliners is then the derived homography.





The maximum number of photos I was able to blend together was four. There were many things I realized while I did this project.
First was that many of my original photos failed to combine because you need a substantial amount of overlap. For instance, the images of the houses at night. Because of how automatic stitching uses feature descriptors of size 39x39, you cannot have points in the region 20 pixels away from all edges.
Something else I realized is that you actually need 5 good points yielded by matches because of how RANSAC works. If you only have 4 good points, by how the algorithm works, all groups of 4 points will equally have 0 inliners even if you as a human can eyeball 4 good pairs.
The original size of the image matters since patches are set to size 39x39. This means that if an image is resized to be smaller, each patch covers more area.
I also suspect that nature images are much worse harder to combine than manmade images. This is probably because there are too many similar points (all the grass) causing them to fail. It might also be because the patches were too small, or because I didn't use ANMS that it failed more on nature images.

There is also a tradeoff between the number of points. If there are too many points, then there are too many possibilities and the likelihood that you randomly find 4 good points becomes smaller. But if there are too little points, then the likelihood that the good points exist within them is also decreased. To get around this, I increased the number of points by lowering the minimum distance of harris corners, but also increased the threshold for finding matches.
I also suspect there is a tradeoff of ransac being deterministic versus random. You can find all combinations of 4 points using itertools. If it is deterministic, it is easier to debug and it is also easier to ensure that you are not retrying the same points. However, if 4 points are really off, then the next 4 points in the list of combinations is also more likely to be off since there is a certain ordering. I found that finding random points actually yielded better results.
I also tried to improve the algorithm in three different ways. One was to use my original mosaic algorithm that utilized points, since RANSAC could also return the inliner points. The problem with this is that after the new image is created, it is possible that an added image obscures where the original points were placed. It would be too complicated to calculate exactly which points would be covered and to alter their homography, so I decided to try other things instead.
You can see below how the points seem almost correct due to their relative position, but become incorrect due to the overlap. Thus, it yielded the interesting result on the right.

I thought it might have been the fact that there was so much more of the image to find points from that the points were not matching. Out of curiosity, I tried to see what the matching points from RANSAC would be if I just cut a portion of the warped result of 4 images. I saw that it was a failure.

I reasoned this was possibly because of two reasons: the sizes were too different since my feature descriptors were not size invariant, or that the image had become too warped so the fds would not match any more.
I tried to resize the added images to various ratios before applying the rest of the algorithm, much like an image pyramid. For some reason, the best ratio for my images was always 1, and the 5th image failed to add as always.
Similar to how my original algorithm warped the points of the next left and next right images, I calculated the homographies between each point and altered those instead. Again, it worked for 4 images, but failed on the 5th one.